MOSAiK:D (2020-2021)
MOSAik:D – M2M-gestützte Optimierung der Sicherheit in Arbeitsstellen kürzerer Dauer
(MOSAik:D – M2M-based optimization of the safety in short-term roadworks sites)
A large part of the measures that serve the operation and maintenance of roads (for example, small repair measures, marking work, …) are carried out in the context of short-term roadworks sites. In contrast to permanent construction sites, however, these are less well secured due to the concept; instead of massive protective walls or guardrails, depending on the time of day, traffic cones or warning beacons are used, which offer practically no protection against vehicles breaking through.
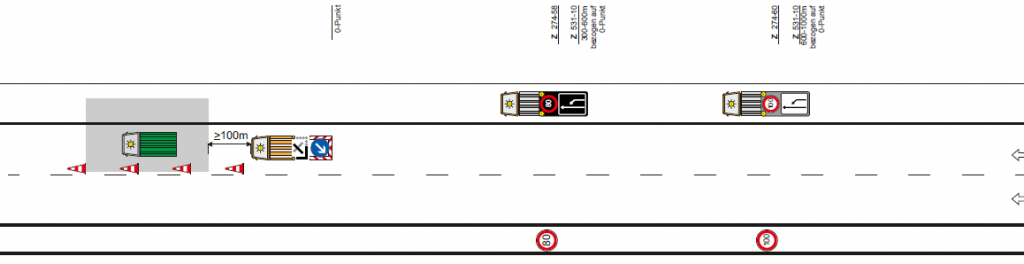
The central goal of the project is therefore to increase safety in short-term roadworks sites, primarily for maintenance personnel, but ultimately also for all other road users. For this purpose, the construction site itself must first be measured and then the movements of the maintenance personnel must be tracked in real time. With the help of this information, as well as information about vehicles in the immediate vicinity (using standardized V2X messages (CAM), which contain vehicle movement data), dangerous situations can be recognized at an early stage. A warning can then be sent both to the endangered employee(s) and to approaching vehicles so that appropriate measures can be taken in good time.
The focus of the work of the FGVT is on the two fields of measurement/localization and communication/warning.
In a first step, a localization technology that meets the requirements as much as possible has to be chosen. Central criteria here are accuracy (since the work is carried out close to the flowing traffic, accuracy in terms of localization in the order of magnitude of 10 cm is required), practicability (quick setup and calibration of the sensors, since the workplaces are only of shorter duration, and personal equipment that is as easy to handle as possible so as not to jeopardize acceptance), reliability (too many false alarms damage acceptance), and a reasonable cost-benefit ratio. Once this technology has been found, it is then the task of the FGVT to integrate it into the operational process as smoothly as possible.
In the second field, a communication architecture is developed. Depending on the localization technology chosen, the position information of the operations service employees, together with the movement information from approaching vehicles, must be collected centrally in a “construction site controller” and processed there. If the construction site controller detects a danger, warnings are sent both to the vehicles (via V2X) and above all to the workers (via communication technology to be determined).
Another result to be expected is that the exact geometry of the construction sites, regardless of any warnings, can be used to send the appropriate geometry to incoming vehicles. This is particularly helpful with a view to automated driving, since there are currently no signs or similar that would indicate the end of a construction site.
Project Partners:
Associated Partners:
Project Runtime:
2020-01-01 – 2022-04-30
Funded by: