MOSAiK:D (2020-2021)
MOSAik:D – M2M-gestützte Optimierung der Sicherheit in Arbeitsstellen kürzerer Dauer
Ein Großteil der Maßnahmen, die dem Betrieb und Unterhalt von Straßen dienen (zum Beispiel kleinere Reparaturmaßnahmen, Markierungsarbeiten, …), werden im Rahmen von Arbeitsstellen kürzerer Dauer (AkD), den sogenannten „Tagesbaustellen“, durchgeführt. Im Gegensatz zu Dauerbaustellen sind diese allerdings konzeptbedingt schlechter gesichert, statt massiver Schutzwände oder Leitplanken werden hier lediglich, je nach Tageszeit, Leitkegel oder Warnbaken genutzt, die praktisch keinen Schutz gegen durchbrechende Fahrzeuge bieten.
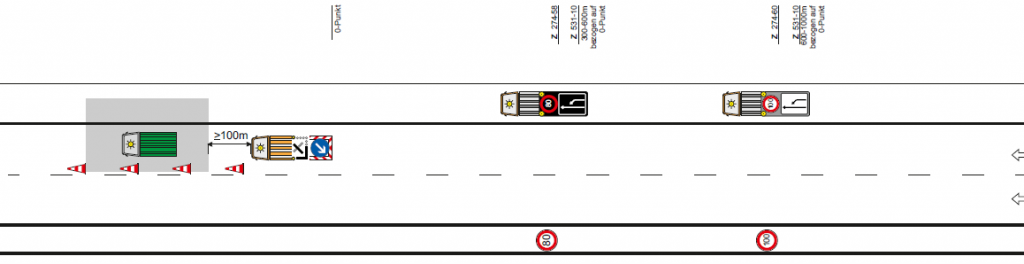
Zentrales Ziel des Vorhabens ist es daher, die Sicherheit in Arbeitsstellen kürzerer Dauer zu erhöhen, in erster Linie für das Baustellenpersonal, letztlich aber auch für alle anderen Verkehrsteilnehmer. Zu diesem Zweck muss zunächst die Baustelle selbst vermessen, sowie im Anschluss die Bewegungen der Betriebsdienstmitarbeiter in Echtzeit verfolgt werden. Mit Hilfe dieser Informationen, sowie mit Informationen über Fahrzeuge in der näheren Umgebung (unter Benutzung standardisierter V2X-Nachrichten (CAM), die Bewegungsdaten der Fahrzeuge enthalten) können gefährliche Situationen frühzeitig erkannt werden. Daraufhin kann eine Warnung, sowohl an den/die gefährdeten Mitarbeiter als auch an sich nähernde Fahrzeuge, verschickt werden, so dass rechtzeitig entsprechende Maßnahmen getroffen werden können.
Der Schwerpunkt der Arbeiten der FGVT liegt hier in den beiden Bereichen Vermessung/Lokalisierung und Kommunikation/Warnung.
In einem ersten Schritt geht es darum, eine Lokalisationstechnologie zu finden, die den Ansprüchen möglichst gerecht wird. Zentrale Kriterien sind hierbei Genauigkeit (da die Arbeiten nahe am fließenden Verkehr durchgeführt werden, werden hier Genauigkeiten bezüglich der Lokalisierung in der Größenordnung von 10 cm gefordert), Praktikabilität (schneller Aufbau und Kalibrierung der Sensorik, da die Arbeitsstellen nur von kürzerer Dauer sind, sowie möglichst einfach zu handhabende persönliche Ausrüstung, um die Akzeptanz nicht zu gefährden), Zuverlässigkeit (auch zu viele Fehlalarme schaden der Akzeptanz), und ein vernünftiges Kosten-Nutzen-Verhältnis. Nachdem diese Technologie gefunden ist, ist es dann auch Aufgabe der FGVT, diese möglichst reibungsfrei in den Betriebsablauf zu integrieren.
Im zweiten Bereich wird zunächst eine Kommunikationsarchitektur entwickelt. Abhängig von der gewählten Lokalisationstechnologie müssen die Positionsinformationen der Betriebsdienstmitarbeiter, zusammen mit den Bewegungsinformationen von sich nähernden Fahrzeugen, zentral in einem „Baustellencontroller“ gesammelt und dort verarbeitet werden. Wenn der Baustellencontroller eine Gefahr erkennt, werden sowohl an die Fahrzeuge (via V2X) als vor allem auch an die Arbeiter (via noch festzulegender Kommunikationstechnologie) noch genauer zu definierende Warnungen verschickt.
Ein weiteres zu erwartendes Ergebnis ist, dass durch die genaue Vermessung der Baustellen, unabhängig von eventuellen Warnungen, die entsprechende Geometrie an ankommende Fahrzeuge verschickt werden kann. Dies ist vor allem hilfreich mit Blick auf das automatisierte Fahren, da es aktuell keine Beschilderung oder ähnliches gibt, die das Ende einer Baustelle anzeigen würde.
Projektpartner:
Assoziierte Partner:
Projektlaufzeit:
2020-01-01 – 2022-04-30
Gefördert von: