kit2rad (2021)
AI-based prediction of the trajectory of bicycles (KI-basierte Prädiktion der Trajektorie von Zweirädern)
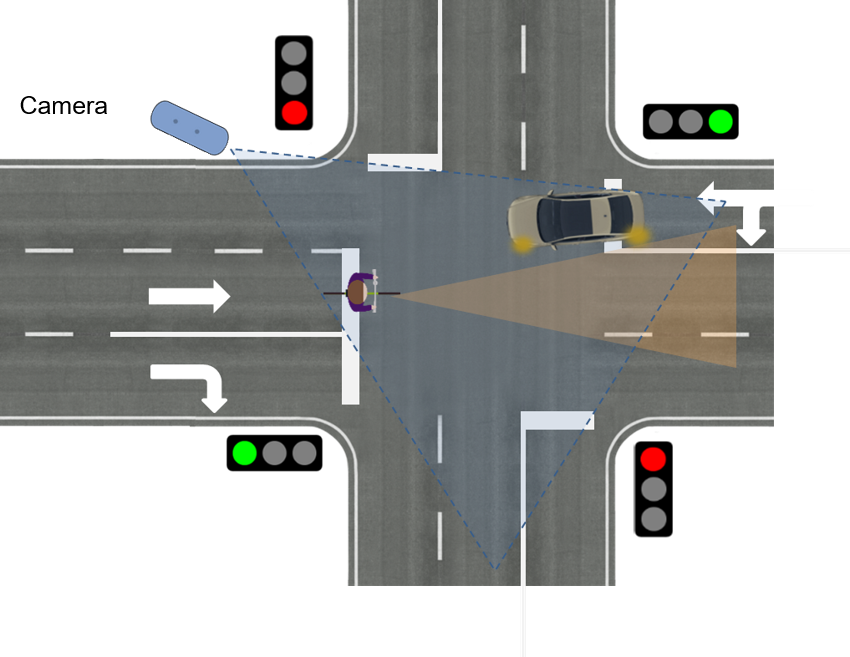
The calculation of the trajectory of one’s own vehicle and that of other road users is an essential component in the development of automated vehicles. It is not sufficient to calculate only the current own trajectory (tactical), but a prediction of the trajectory has to be carried out (strategic), in order to increase traffic safety due to the larger planning horizon. This information, sensibly disseminated, can already be an important source of information for manually guided vehicles in the current phase of increasing automation in order to warn drivers of possible collisions with other road users and to take measures. Especially in urban areas, serious accidents often occur due to misjudgment of the traffic situation. The use of artificial intelligence and digital maps already allows relatively good predictions of the movement of four-wheeled vehicles today. In contrast, two-wheeled vehicles are more difficult to predict due to their higher dynamics and the faster possibility of changing the direction of movement. This is where the kit2rad project comes in. The project uses AI algorithms to perform considerations on the prediction of the trajectory of two-wheeled vehicles. For this purpose, data (of two-wheelers/traffic infrastructure) of real traffic situations are recorded and different AI-algorithms (parameterizations) are examined for their effectiveness in predicting a trajectory.
Project duration
01.01.2021 till 31.12.2021 (12 months)
Project partner
Funded by: