kit2rad (2021)
KI-basierte Prädiktion der Trajektorie von Zweirädern
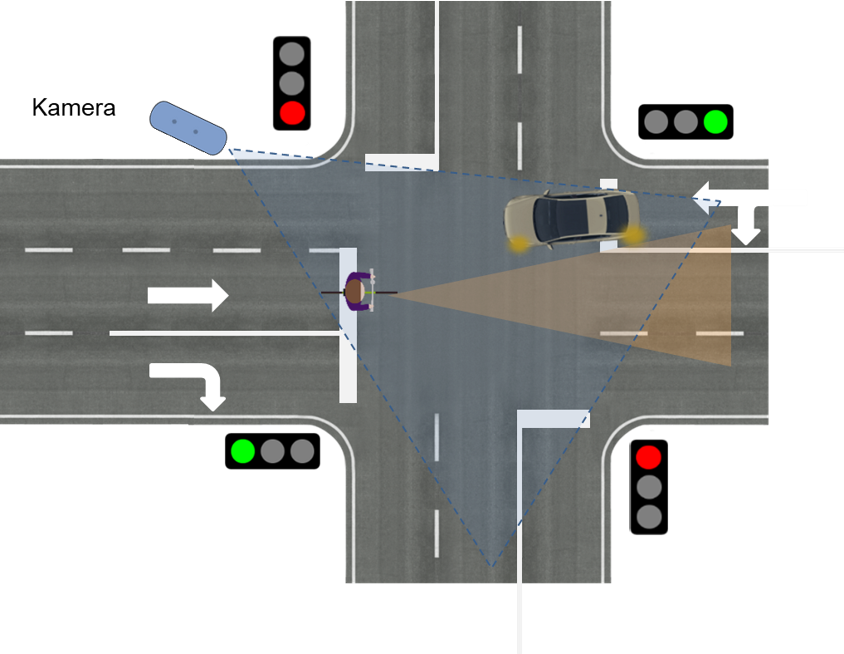
Die Berechnung der Trajektorie des eigenen Fahrzeugs und die der anderen Verkehrsteilnehmer ist ein essenzieller Bestandteil in der Entwicklung automatisierter Fahrzeuge. Es ist nicht ausreichend nur die aktuelle eigene Trajektorie zu berechnen (taktisch), sondern es ist eine Prädiktion der Trajektorie durchzuführen (strategisch), um durch den größeren Planungshorizont die Verkehrssicherheit zu erhöhen. Diese Informationen, sinnvoll verbreitet, können bereits in der aktuellen Phase der zunehmenden Automatisierung für manuell geführte Fahrzeuge eine wichtige Quelle sein, um die Fahrer vor möglichen Kollisionen mit anderen Verkehrsteilnehmern zu warnen und Maßnahmen zu ergreifen. Gerade im städtischen Bereich passieren oft schwere Unfälle durch Fehleinschätzung der Verkehrssituation. Der Einsatz von künstlicher Intelligenz und digitalen Karten erlaubt heute bereits relativ gute Vorhersagen zur Bewegung vierrädriger Fahrzeuge. Im Gegensatz dazu sind Zweiräder aufgrund ihrer höheren Dynamik und der schnelleren Möglichkeit der Änderung der Bewegungsrichtung schwieriger vorherzusagen. An diesem Punkt setzt das Projekt kit2rad an. Im Projekt werden auf Basis von KI-Algorithmen Überlegungen zum Thema Prädiktion der Trajektorie von Zweirädern durchgeführt. Dazu werden Daten (von Zweirad/Verkehrsinfrastruktur) von realen Verkehrssituationen aufgezeichnet und unterschiedliche KI-Algorithmen (Parametrisierungen) auf ihre Wirksamkeit bei der Prädiktion einer Trajektorie untersucht.
Projektlaufzeit
01.01.2021 bis 31.12.2021 (12 Monate)
Projektpartner
Gefördert von: